
१. वर्तुळाकार विणकाम यंत्र तंत्रज्ञानाचा परिचय
१. वर्तुळाकार विणकाम यंत्राचा संक्षिप्त परिचय
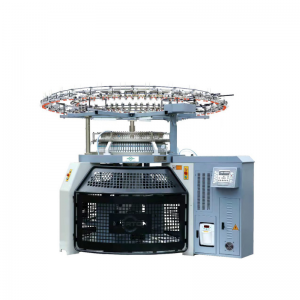
वर्तुळाकार विणकाम विणकाम यंत्र (आकृती १ मध्ये दाखवल्याप्रमाणे) हे एक उपकरण आहे जे कापसाचे धागे नळीच्या आकाराच्या कापडात विणते. हे प्रामुख्याने विविध प्रकारचे वाढलेले विणलेले कापड, टी-शर्ट कापड, छिद्रे असलेले विविध नमुनेदार कापड इत्यादी विणण्यासाठी वापरले जाते. संरचनेनुसार, ते सिंगल जर्सी वर्तुळाकार विणकाम यंत्र आणि डबल जर्सी वर्तुळाकार विणकाम यंत्रात विभागले जाऊ शकते, जे कापड उद्योगात मोठ्या प्रमाणावर वापरले जाते.
 २. प्रक्रिया आवश्यकता
२. प्रक्रिया आवश्यकता
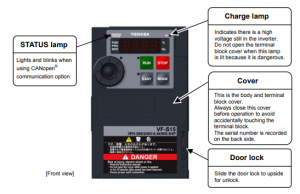
(१) इन्व्हर्टरला मजबूत पर्यावरणीय प्रतिकार असणे आवश्यक आहे, कारण साइटवरील कामाच्या वातावरणाचे तापमान तुलनेने जास्त असते आणि कापसामुळे कूलिंग फॅन सहजपणे थांबू शकतो आणि खराब होऊ शकतो आणि कूलिंग होल ब्लॉक होऊ शकतात.
(२) लवचिक इंचिंग ऑपरेशन फंक्शन आवश्यक आहे. उपकरणांच्या अनेक ठिकाणी इंचिंग बटणे बसवलेली आहेत आणि इन्व्हर्टरला जलद प्रतिसाद देणे आवश्यक आहे.
(३) वेग नियंत्रणासाठी तीन वेग आवश्यक आहेत. एक म्हणजे इंचिंग ऑपरेशन स्पीड, साधारणतः ६ हर्ट्झच्या आसपास; दुसरा सामान्य विणकाम स्पीड, ७० हर्ट्झ पर्यंतची सर्वाधिक वारंवारता; तिसरा कमी-वेगाने गोळा करण्याचे ऑपरेशन आहे, ज्यासाठी सुमारे २० हर्ट्झची वारंवारता आवश्यक आहे.
(४) वर्तुळाकार विणकाम यंत्राच्या ऑपरेशन दरम्यान, मोटर उलटणे आणि फिरवणे पूर्णपणे प्रतिबंधित आहे, अन्यथा सुईच्या बेडच्या सुया वाकल्या किंवा तुटल्या जातील. जर वर्तुळाकार विणकाम यंत्र सिंगल-फेज बेअरिंग वापरत असेल, तर याचा विचार केला जाणार नाही. जर सिस्टम पुढे आणि उलट फिरत असेल तर ते पूर्णपणे मोटरच्या पुढे आणि उलट फिरण्यावर अवलंबून असते. एकीकडे, ते उलट फिरण्यास प्रतिबंधित करण्यास सक्षम असणे आवश्यक आहे आणि दुसरीकडे, रोटेशन दूर करण्यासाठी डीसी ब्रेकिंग सेट करणे आवश्यक आहे.
३. कामगिरी आवश्यकता
विणकाम करताना, भार जास्त असतो आणि इंचिंग/स्टार्टिंग प्रक्रिया जलद असणे आवश्यक असते, ज्यासाठी इन्व्हर्टरमध्ये कमी वारंवारता, मोठा टॉर्क आणि जलद प्रतिसाद गती असणे आवश्यक असते. मोटरची गती स्थिरीकरण अचूकता आणि कमी-फ्रिक्वेंसी टॉर्क आउटपुट सुधारण्यासाठी फ्रिक्वेन्सी कन्व्हर्टर वेक्टर कंट्रोल मोडचा अवलंब करतो.
४. वायरिंग नियंत्रित करा
वर्तुळाकार विणकाम विणकाम यंत्राचा नियंत्रण भाग मायक्रोकंट्रोलर किंवा पीएलसी + मानवी-मशीन इंटरफेस नियंत्रण स्वीकारतो. फ्रिक्वेन्सी कन्व्हर्टर सुरू आणि थांबण्यासाठी टर्मिनल्सद्वारे नियंत्रित केला जातो आणि वारंवारता अॅनालॉग प्रमाण किंवा मल्टी-स्टेज फ्रिक्वेन्सी सेटिंगद्वारे दिली जाते.
मल्टी-स्पीड कंट्रोलसाठी मुळात दोन नियंत्रण योजना आहेत. एक म्हणजे फ्रिक्वेन्सी सेट करण्यासाठी अॅनालॉग वापरणे. जॉगिंग असो किंवा हाय-स्पीड आणि लो-स्पीड ऑपरेशन असो, अॅनालॉग सिग्नल आणि ऑपरेटिंग सूचना नियंत्रण प्रणालीद्वारे दिल्या जातात; दुसरे म्हणजे फ्रिक्वेन्सी कन्व्हर्टर वापरणे. बिल्ट-इन मल्टी-स्टेज फ्रिक्वेन्सी सेटिंग, कंट्रोल सिस्टम मल्टी-स्टेज फ्रिक्वेन्सी स्विचिंग सिग्नल देते, जॉग इन्व्हर्टरद्वारेच प्रदान केला जातो आणि हाय-स्पीड विव्हिंग फ्रिक्वेन्सी अॅनालॉग क्वांटिटी किंवा इन्व्हर्टरच्या डिजिटल सेटिंगद्वारे दिली जाते.
२. साइटवरील आवश्यकता आणि कमिशनिंग योजना
(१) साइटवरील आवश्यकता
वर्तुळाकार विणकाम यंत्र उद्योगात इन्व्हर्टरच्या नियंत्रण कार्यासाठी तुलनेने सोप्या आवश्यकता असतात. साधारणपणे, ते सुरू आणि थांबा नियंत्रित करण्यासाठी टर्मिनल्सशी जोडलेले असते, अॅनालॉग वारंवारता दिली जाते किंवा वारंवारता सेट करण्यासाठी मल्टी-स्पीड वापरली जाते. इंचिंग किंवा कमी-स्पीड ऑपरेशन जलद असणे आवश्यक आहे, म्हणून कमी वारंवारतेवर मोठ्या कमी-फ्रिक्वेन्सी टॉर्क निर्माण करण्यासाठी इन्व्हर्टरला मोटर नियंत्रित करणे आवश्यक आहे. साधारणपणे, वर्तुळाकार विणकाम यंत्रांच्या वापरामध्ये, फ्रिक्वेन्सी कन्व्हर्टरचा V/F मोड पुरेसा असतो.
(२) डीबगिंग योजना आम्ही स्वीकारत असलेली योजना अशी आहे: C320 मालिका सेन्सरलेस करंट वेक्टर इन्व्हर्टर पॉवर: 3.7 आणि 5.5KW
३. पॅरामीटर्स आणि सूचना डीबग करणे
१. वायरिंग आकृती
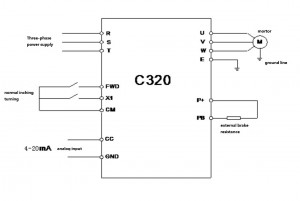
२. डीबग पॅरामीटर सेटिंग
(१) F0.0=0 VF मोड
(२) F0.1=6 वारंवारता इनपुट चॅनेल बाह्य प्रवाह सिग्नल
(३) F0.4=0001 बाह्य टर्मिनल नियंत्रण
(४) F0.6=0010 उलट फिरवण्याची प्रतिबंधकता वैध आहे
(५) F0.10=५ प्रवेग वेळ ५S
(6) F0.11=0.8 मंदावण्याची वेळ 0.8S
(७) F0.16=6 वाहक वारंवारता 6K
(८) F1.1=४ टॉर्क बूस्ट ४
(9) F3.0=6 पुढे धावण्यासाठी X1 सेट करा.
(१०) F४.१०=६ धावण्याची वारंवारता ६HZ वर सेट करा.
(११) F4.21=3.5 धावण्याच्या प्रवेगाची वेळ 3.5S वर सेट करा.
(१२) F4.22=1.5 धावण्याची गती कमी करण्याचा वेळ 1.5S वर सेट करते.
नोट्स डीबग करणे
(१) प्रथम, मोटरची दिशा निश्चित करण्यासाठी जॉगिंग करा.
(२) जॉगिंग दरम्यान कंपन आणि मंद प्रतिसादाच्या समस्यांबाबत, जॉगिंगचा प्रवेग आणि मंदावण्याचा वेळ आवश्यकतेनुसार समायोजित करणे आवश्यक आहे.
(३) कॅरियर वेव्ह आणि टॉर्क बूस्ट समायोजित करून कमी-फ्रिक्वेन्सी टॉर्क सुधारता येतो.
(४) कापसाचे लोकर हवेच्या नळीला अडथळा आणते आणि पंखा बंद पडतो, ज्यामुळे इन्व्हर्टरची उष्णता कमी प्रमाणात कमी होते. ही परिस्थिती वारंवार घडते. सध्या, सामान्य इन्व्हर्टर थर्मल अलार्म वगळतो आणि नंतर वापर सुरू ठेवण्यापूर्वी एअर डक्टमधील लिंट मॅन्युअली काढून टाकतो.
पोस्ट वेळ: सप्टेंबर-०८-२०२३